Le premier programme d’étude des Etats-Unis pour tenter de réaliser des engins à antigravité.
En 1943, les forces armées Américaines lançèrent un projet nommé « Aquarius » (« Verseau »), pour étudier la possibilité de réaliser des aéronefs utilisant l’antigravité comme mode de propulsion. Ce programme sera décliné par le biais de deux sous-projets (qui eux étaient connus officiellement du public):
– Le projet « Magnet », ce programme Américano-Canadien s’orienta vers l’étude de zones d’influence magnétique (en fait, des zones à antigravité naturelles présentent sur Terre). Ils s’intéressèrent particulièrement à un vortex présent au sud du lac Ontario (1).
– Le projet « Winterhaven », celui-ci devait mettre à contribution des industriels, aussi bien civils que militaires, pour entreprendre des études théoriques et pratiques sur l’antigravité (2).
Il faut préciser qu’une des principales caractéristiques du projet Aquarius est qu’officiellement, il ne faisait appel qu’à des connaissances et technologies terrestres, connues à l’époque, sans avoir recours à aucun apport provenant d’une technologie extraterrestre (3).
L’objectif a été dès le départ, de pouvoir obtenir des véhicules spatiaux antigravitationnels, qui auraient des capacités de vols interplanétaires. Deux types d’engins seront mis au point: un drône télécommandé et propulsé par un moteur antigravitionnel « magnéto-électrostatique »; et plusieurs engins pilotés de types « ARV », « Antigravity Research Vehicle », qui avait la forme d’une soucoupe.
Le ARV, « Flux Liner ».
L’existence de ce véhicule a été établie avec certitude comme étant le seul aéronef piloté, issu du programme Aquarius. Il y a en fait trois modèles du ARV, « Antigravity Research Vehicle Flux Liner », « véhicule de recherche antigravitationnel », ayant chacun des caractéristiques identiques mais étant de tailles différentes:
– ARV 01, le premier modèle de 38 mètres de diamètre;
– ARV 02, le second modèle de 18,60 mètres de diamètre;
– ARV 03, le troisième modèle de 9,30 mètres de diamètre.
Les caractéristiques techniques du ARV.
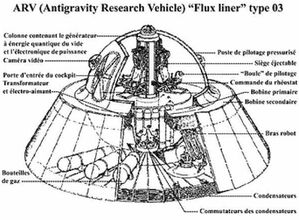
Les ARV ont la forme d’un tronçon de cône dont les côtés ont une inclinaison de 35 degrés. Ce tronçon de cône est surmonté d’un poste de pilotage de même forme mais d’un diamètre plus petit (pour le modèle 03, il a un poste de pilotage de forme sphérique, plan ci-dessous).
Une colonne cylindrique placée au centre du poste du poste de pilotage, contient le générateur à énergie quantique du vide ainsi que les circuits électroniques de commande de l’appareil. Un double bobinage annulaire entoure le poste de pilotage et remplit la double fonction de transformateur à haute tension et d’électro-aimant. Enfin, un réseau radial de condensateurs forme le plancher de l’engin.
La propulsion du ARV.
La partie circulaire inférieure comprend quarante-huit modules condensateurs assurant la propulsion antigravitationnelle du ARV. Ces modules en forme de « tranches » triangulaires à la base arrondie (comme les parts découpées d’une tarte), et d’un poids unitaire d’environ cinq tonnes, sont chacun composés de quatre condensateurs superposés de polarité électrique alternativement négative et positive en partant du bas vers le haut.
Afin d’éviter les effets « d’arcs électriques » entre les commutateur à haute tension, les modules ne se rejoignant pas au centre de l’appareil qui comprend un espace vide de 3,20 mètres de diamètre. Chaque module comprend donc huit plaques de cuivre (de 13 mm d’épaisseur) séparées par des isolants (de 60mm d’épaisseur).
La nature de l’isolant ne nous est pas connue, mais comme il a une apparence de verre avec une couleur bleu-vert, on peut penser qu’il pourrait s’agir d’un verre minéral renforcé et durçit à l’oxyde d’uranium (au début des années cinquante, c’était ce que l’on connaissait de mieux en matière de diélectrique le plus performant). Chacun des quarante-huit modules condensateurs, est lui-même enrobé de cet isolant transparent.
Comme les variateurs électroniques de puissance ainsi que les commutateurs électroniques n’existaient pas encore au début des années cinquante, les ingénieurs firent appel à des commutateurs électromécaniques. Du coup, les quarante-huit modules condensateurs sont eux-même divisés en quatre groupes de vingt-deux modules condensateurs indépendants.
Depuis les années soixante-dix, on a remarqué que les ARV observés, avaient désormais des « plaques » sombres sur le pourtour de son fuselage, qui n’existaient pas sur les premier modèles. On pense que ce sont des condensateurs supplémentaires permettant une accélération horizontale du véhicule, sans avoir besoin de l’incliner au préalable.
D’après les témoignages disponibles, le ARV pourrait atteindre n’importe quelle vitesse, y compris les vitesses supérieures à celle de la lumière (mais si cette vitesse « supraluminique » est utilisée, le trajet devra se faire par « bonds » successifs, pour ne pas heurter des corps célestes, qui désintégreraient instantanément l’appareil). Ce qui fait que son utilisation ait été limitée au départ à notre système solaire.
On ne connait pas quel est la géométrie du champs antigravitationnel du ARV, mais en fait, les bases principales de la recherche, seront les travaux de Nikola Tesla, ceux de la Fondation Towsend Brown (avec les travaux sur « l’effet Bielefeld-Brown »), et le moteur antigravitationnel inventé en 1947 par John Searl. Celui-ci faisant appel à un champs électrostatique traversé par un champs magnétique, exactement comme pour le moteur du ARV (4).
Le système de contrôle.
La poussée générale de l’appareil est contrôlée par un unique rhéostat alors que l’inclinaison est contrôlée par la commutation d’un nombre plus ou moins important de modules condensateurs à l’intérieur de chaque groupe de vingt-deux modules. Selon le nombre de modules connectés à l’intérieur d’un groupe de vingt-deux modules, on obtient dans cette zone une poussée plus ou moins grande.




Le siège du pilote comprend sur l’accoudoir droit du siège la commande du rhéostat et sur l’accoudoir gauche la commande d’orientation du ARV. Il n’y a en fait que deux commande de direction, à droite, la puissance (pour gérer la vitesse) et à gauche, l’orientation (pour rêgler la direction). Et un ingénieux système permettait de stabiliser automatiquement l’appareil en vol stationnaire (cette sorte de gyroscope pour véhicule antigravitationnel reste encore une énigme sur son principe exact de fonctionnement).
La colonne centrale du poste de pilotage contient respectivement de haut en bas le générateur à énergie du vide quantique, le rhéostat contrôlant la quantité de courant électrique envoyé dans le transformateur et enfin les commutateurs électromécaniques des condensateurs.
Le générateur à énergie.
Bien que l’on ne connaisse pas exactement le modèle de générateur d’énergie libre utilisé par le ARV, tout porte à croire qu’il s’agissait du générateur de Tesla. Ce qui est certain, c’est que c’était un générateur délivrant directement de l’énergie électrique « froide », c’est-à-dire une « flèche temporelle » inverse.
Les autres éléments constituant l’appareil.
Sous le plancher du ARV, formé par le dessus isolant des quarante-huit modules, il y a une série de bouteilles d’oxygène destinées à la pressurisation du poste de pilotage. Chacune des bouteilles a un diamètres de 46 cm, pour une longueur de 186 cm. Le poste de pilotage pressurisé est entouré d’un double bobinage de cuivre d’une épaisseur de 23 cm et d’une largeur de 46 cm, isolé par le même matériau diélectrique transparent que les condensateurs.
Le bobinage intérieur est constitué d’un nombre de spires de fils de cuivre plus petit que le bobinage extérieur. Il forme l’étage « basse-tension » d’un transformateur. Et le bobinage extérieur forme l’étage « haute-tension ». Tout en remplissant leur rôle de transformateur haute tension, ces bobinages créent aussi un puissant champ magnétique vertical qui englobe l’ensemble du ARV.
La colonne centrale sert de support pour sièges éjectables de types « Martin Baker modèle 5 » de fabrication Britannique. Ces sièges éjectables (de manière latérale par des rails, après éjection de la structure du cockpit) sont utilisables dans l’atmosphère jusqu’à une altitude de 4500 mètres. L’extérieur du poste de pilotage comprend cinq caméras de télévision, placées sous des dômes transparents, qui diffusaient les images sur des écrans classiques, pour l’équipage. Mais à partir des années soixante, les caméras enverront une image panoramique de l’environnement, qui sera diffusée aux membres d’équipages, qui étaient munit de casques de vision virtuelle (qui venaient d’être mis au point à l’époque).
Il y avait trois autres caméras sur la face inférieure, qui servaient surtout à l’atterrissage.
On trouve aussi sur le plancher un bras robot télécommandé, du même modèle que l’on utilisait dans l’industrie nucléaire de l’époque. Celui-ci permettait des prélèvements d’échantillons sur les sols planétaires. Et précision importante, étant donné qu’il était destiné exclusivement à l’exploration spatiale, malgré qu’il avait été conçu dans un programme de recherche militaire, le ARV ne disposait d’aucun armement.
Le ARV ne dispose pas de train d’atterrissage, tout ceux qui l’on aperçu, disent qu’il flotte continuellement à quelques centimètres du sol, une fois qu’il est posé.
Le premier essai du démonstrateur de vol du ARV « Flux Liner », a eu lieu en 1954. C’est semble-t-il le modèle 01 qui vola le premier. Les essais des autres modèles se sont déroulés durant les années qui suivirent, jusque dans le années soixante.
On ne connait pas les autres modèles du ARV qui sont peut-être sorti par la suite, mais on a observera des véhicules ARV légèrement différents, dans les années soixante-dix (avec des plaques noirs sur le pourtour).
Lire aussi :
La technologie ARV des Nazis et l’Intelligence artificielle au service du Transhumanisme
Le drône antigravitationnel télécommandé.
Ce drône, qui fait trois mètres de diamètre (pour la plus petite version du ARV, le modèle 03), peut être embarqué par le dessous de l’appareil porteur, et peut être lancé en vol, pour ensuite être piloté et guidé depuis le ARV, pour des missions de surveillance ou d’espionnage (photo ci-dessous, où l’on peut voir un ARV modèle 03, en train de larguer son drône télécommandé).

Et sur cette autre photo, prise en 1957, où l’on peut voir le drône, en train de suivre un appareil militaire Américain, agrandissement à gauche sur l’image (on a longtemps pensé que cet objet était un ovni).

Comment a-t-on eu connaissance de l’existence du ARV?
Le premier témoin qui a apporté des indications précises sur le ARV, fût l’ingénieur aéronautique Brad Sorensen. En faisant jouer ses relations dans le milieu militaire, Sorensen a réussi à assister le 12 novembre 1988, à une présentation confidentielle des trois modèles de l’engin, dans un hangar de la base de Norton (Californie), pour les plus hauts gradés du Pentagone. Bien qu’il n’est eu accès qu’au ARV du troisième type, en partie démonté, pour voir l’intérieur, les trois modèles ayant des caractéristiques identiques, il a été assez aisé de reconstituer la structure et le fonctionnement des autres modèles.
Il a décrit tout ce qu’il a vu à son ami Mark Mc Candlish, qui est l’un des plus grand illustrateur aéronautique au monde qui travaillait pour les plus grandes firmes Américaines. Ce dernier réalisera une illustration avec une représentation détaillée du ARV (c’est à lui que l’on doit le plan en perspective du ARV type 03, figurant plus haut).
Intéressé par le sujet, Mc Candlish, cherchera à se renseigner sur le ARV. Il en parlera à un ancien pilote d’essai, du nom de Bill Scott (qui était le rédacteur en chef régional de la publication professionnelle « Aviation Week and Space Technology »). Ce dernier lui fera rencontrer en 1992, le dénommé Kent Sellen (avec qui Scott avait travaillé quand il était pilote).
Quand Mc Candlish commencera à parler de ce qu’il avait appris du ARV par Sorensen, Sellen dira: « Oui, je sais de quoi vous êtes en train de parler ». « Mais comment pouvez-vous savoir ce dont je suis en train de vous parler ? » lui demandera Mc Candlish, et Sellen lui répondra: « Parce que j’en ai vu un ». Il l’avait vu dans les années soixante-dix, quand il était stationné à la base d’Edwards, lorsqu’on l’avait appelé en pleine nuit pour lui demander d’aller chercher une unité électrique (qui servait pour les avions) dans un hangar, qui était en panne, pour l’amener à l’atelier de réparation. Quand il s’est approché d’un des hangars éclairés, croyant y trouver l’unité électrique à réparer, il verra par la porte entre-ouverte, un engin semblable au ARV, en train de faire du surplace au dessus du sol.
Voir cet épisode de Cosmic Disclosure qui relate cette histoire :
Révéler les véhicules spatiaux originels avec MARK McCANDLISH
Ce ne sera pas le seul à voir le ARV dans le hangar d’une base de l’Air Force. Un autre ancien militaire nommé John Eppolito, le verra aussi, peu avant 1982. Ce dernier – qui avait raconté à l’époque « qu’il avait vu un ovni dans un hangar » – avait en fait décrit sans le savoir, bien avant Sorensen, le ARV. Il aura à peine le temps de le regarder attentivement, que des gardes arriveront pour le plaquer au sol, sous la menace de leurs armes, en lui disant de fermer les yeux (ils lui mettront une cagoule) avant de le mettre au secret, où il sera débriefé pendant 18 heures (pour bien lui faire comprendre, « qu’il n’a rien vu »). Quand Eppolito verra le dessin et des photos du ARV, il reconnaitra l’engin qu’il avait vu ce jour-là lui-aussi dans un hangar.
Des photographies du ARV furent prisent au-dessus de Namur en 1955. Il s’agissait du modèle 01. Et une autre photographie (parfaitement authentifiée) sera réalisée en juillet 1966 par le pilote d’un C47 Dakota (vol militaire) au dessus des montagnes Rocheuses, près de Provo (Utha). Il s’agit ici du modèle 02 (photo originale et agrandissement ci-dessous) (5).

Cela nous montre que les Etats-Unis ont en fait depuis plusieurs dizaine d’années, toute latitude pour effectuer des voyages interplanétaires, sans le besoin d’avoir recours aux fusées.
La conquête spatiale officielle n’étant qu’une « vitrine » officielle, organisée par la NASA.
Les Etats-Unis ne voulant pas rendre public cette innovation technologique, et le reste du monde, ne comprendrait pas que le pays le « plus puissant du monde », n’est pas de programme spatial, il leur fallait bien donner le change (6).
Dans cet article nous apprenons l’origine réelle de la technologie ARV :
Origine du SSP Allemand. Les « Seigneurs de la Pierre Noire » et la Société Vril
Notes
- (1) Ce programme était aussi un programme d’étude sur les ovnis. Pour plus d’informations, voir « Les Black Program: Le Projet Magnet ».
- (2) Pour plus d’informations, voir « Les Black Program: Le Projet Winterhaven ».
- (3) Même si ce projet étudia également la technologie des épaves d’engins extraterrestres récupérés; ils eurent extrêmement de difficulté à essayer de les reproduire. L’ARV n’est donc pas, malgré qu’on le nomme souvent « Alien Reproductive Vehicle », une reproduction pure et simple à l’identique, d’un engin extraterrestre déjà éxistant.
- (4) Pour plus d’informations sur les travaux de Searl, voir « La production d’énergie illimitée non polluante », dans la catégorie « Technologies Alternatives ».
- (5) Une autre photo en noir et blanc circule, celle qui est visible en début d’article, mais il s’agit en fait de la même photo que celle de Provo, qui a été recadrée par un agrandissement et convertie en noir et blanc.
- (6) Pour plus d’explication sur les raisons du secret maintenu par les Etats-Unis sur l’antigravité, voir les explications à la fin de l’article « Engins à antigravité: Principes et réalisations », dans la catégorie « Technologies Alternatives »
Que pensez-vous de cet article ? Partagez autant que possible. L'info doit circuler.
|
Aidez Elishean à survivre. Merci |